Étude analytique et acoustique de l'effet Doppler.
1. L'effet Doppler.
1.1. Le phénomène.
•
L'effet Doppler est le changement apparent de la fréquence d'un signal sonore ou électromagnétique reçu
par un observateur fixe par rapport à une source émettrice mobile ; ou bien par un observateur mobile par rapport à une source émettrice fixe.
• La variation apparente de fréquence dépend de la vitesse relative entre l'observateur et la source le long du chemin qui les sépare et de la célérité du signal sonore ou
électromagnétique.
1.2. Décalage en fréquence engendré par un émetteur qui s'approche d'un observateur fixe.
1.2.1. Position du problème.
• L'émetteur se déplace à la vitesse `color(navy)(vecv)` vers l'observateur qui est fixe.
• L'émetteur est à la distance D de l'observateur et émet un premier
« top » à la date t0 = 0 s.
• Les ondes « acoustiques » se propagent avec la célérité c.
1.2.2. Calcul du « décalage » Doppler de l'onde percue par l'observateur.
• L'observateur reçoit le premier « top »
à la date : `t_1 = D/c`.
• L'émetteur envoie le deuxième « top »
à la date : `t_2 = T_E`, où `T_E` est l'intervalle de temps entre deux « tops » ; c'est aussi la période de l'onde sonore (constituée de « tops »).
• Pendant la durée `color(navy)(T_E)`, l'émetteur a parcouru la distance : `color(navy)(v.T_E)`.
• Le récepteur reçoit le deuxième «
top
»
à la date : `t_3 = T_E + {D - v.T_E}/c` ; où `{D - v.T_E}/c` est la distance qu'a dû parcourir l'onde émise par l'émetteur pour atteindre l'observateur.
• L'intervalle de temps pendant lequel l'observateur reçoit successivement les « tops » est égal à : `t_3 - t_1` ; c'est aussi la période apparente `color(navy)(T_D)` avec laquelle il perçoit l'onde sonore émise par l'émetteur ; on écrit : `color(navy)(t_3 - t_1 = T_D)`.
• On observe que `color(navy)(T_D < T_E)` ; la période apparente perçue par l'observateur fixe est plus petite que la période du signal émis par l'émetteur mobile.
• En terme de fréquence, on écrit : `f_D = 1/T_D` et `f_E = 1/T_E` ; il vient : `color(navy)(f_D = f_E/{1 - frac{v}{c}})`.
• On observe que
`color(navy)(f_E < f_D)` ; la fréquence apparente
perçue par l'observateur fixe est plus grande que la
fréquence du signal émis par l'émetteur mobile.
1.3. « Décalage » Doppler engendré par un émetteur qui s'approche d'un observateur fixe suivant un angle d'incidence θ.
1.3.1. Position du problème.
• Schématisons la situation :
• La vitesse
d'approche de l'émetteur n'est plus égale à v ; maintenant elle est égale à la projection orthogonale de `color(navy)(vecv)` suivant la direction Émetteur
-
Observateur,
on note EH cette projection ; on a alors : EH = v cos(θ).
Remarque : Il s'agit de la vitesse dite « radiale
»...
1.3.2. Expression du « décalage » Doppler.
• Il vient alors : `color(navy)(f_D = f_E/{1 - v/{c} cos(theta)}`.
Remarque : Il n'y a pas de décalage Doppler quand : `color(red)(theta = +-pi/2)`.
2. Étude analytique et graphique de l'effet Doppler.
2.1. Modélisation du problème.
• Un émetteur mobile
se déplace sur une route rectiligne à la vitesse constante `color(navy)(vecv)` ; il est « écouté » par un observateur fixe situé sur le bord de la route.
• Sur le schéma ci-dessous, nous représentons la situation.
• Un véhicule parcourt à la vitesse constante `vecv`, une route rectiligne comprise entre les points A et B ; il émet un
son fonction sinusoïdale du temps de fréquence `color(navy)(f_E = 880 Hz (La_4))`. Un observateur est placé au point O sur le segment OM qui est la médiatrice du segment AB ; il « écoute » le son émis par le véhicule...
•Données
numériques :
- Vitesse du véhicule : v = 118,8 km.h-1.
- Célerité des ondes acoustiques : c = 330 m.s-1.
- Distance entre les points A et B : D = 264 m.
- Distance entre les points O et M : d = 26,4 m.
2.2. Hypothèses de travail.
• On souhaite tracer le graphe de la fréquence `f_D` percue par
l'observateur en fonction du temps.
• On observe que le déroulement dans le temps est lié à la vitesse de
déplacement du véhicule ; aussi nous allons exprimer l'équation qui
décrit la fréquence Doppler percue par l'observateur en prenant en
compte la vitesse du véhicule et le temps.
2.3. Expression analytique de la fréquence Doppler.
• Nous exploitons l'expression : `color(navy)(f_D = f_E/{1 - v/{c}
cos(theta)}`, établie au paragraphe
- 1.3.2.
2.3.1. Mise en forme des
calculs.
• Dans la relation : `color(navy)(f_D = f_E/{1 - v/{c} cos(theta)}` ;
`v, c, f_E` sont des constantes seul
cos(θ) varie avec
le temps.
• À la date t0 = 0 s, le véhicule est
en A ; à la date t « quelconque » le
véhicule est en I...
• Partant du triangle rectangle IMO rectangle en M, on peut écrire :
`color(navy)(cos(theta) = {IM}/{IO})`.
• Avec : `color(navy)(IM = D/2 - v t)` ; et `color(navy)(IO = sqrt(d^2
+ (D/2 -v t)^2))`.
• Il vient : `color(navy)(cos(theta) = {D/2 - v t}/{sqrt(d^2 + (D/2 -v
t)^2)}`.
• Posons : `color(navy)(T_{1/2} = D/{2 v})` ; c'est évidemment le temps
mis par le véhicule pour parcourir la motié de la distance D ; et
`T_{1/2} = {264xx3,6}/{2xx118,8} s` ; soit : `color(navy)(T_{1/2}
= 4 s)`.
Remarque : Nous
avons dû convertir les km.h-1
en ms-1...
• Nous observons que lorsque le véhicule est à gauche du point M,
`0 le cos(theta) lt 1` ; et la fréquence perçue par l'observateur est
telle que `f_E lt f_D`, avec `t in [ 0, T_{1/2}]`.
• Nous observons que lorsque le véhicule est à droite du point M,
`-1 lt cos(theta) le 0` ; et la fréquence perçue par l'observateur est
telle que `f_D lt f_E`, avec `t in [ T_{1/2}, 2 T_{1/2}]`.
• L'expression que nous avons formulée pour cos(θ) traduit bien
les observations !
2.3.3. Expression analytique
de la fréquence Doppler en fonction du temps.
• Partant de la relation : `color(navy)(f_D = f_E/{1 - v/{c}
cos(theta)}` et de `color(navy)(cos(theta) = {1 -
t/T_{1/2}}/sqrt({4d^2}/{D^2} + (1 - t/T_{1/2})^2))`.
• À partir des données, on obtient : `color(navy)(f_D(t) =880/{1 -
{0,1(1
- t/4)}/sqrt(0,04 + (1 - t/4)^2)) Hz` ; fonction qu'il est facile
de programmer et de soumettre à un « grapheur » tel que gnuplot®.
2.4. Graphe donnant l'évolution de la fréquence Doppler en fonction
du temps.
Remarque
: Ce graphe a été tracé à l'aide du
logiciel gnuplot®.
• Nous avons affaire à un signal
modulé en fréquence comme le prouve le graphe !
3. Illustration « sonore » de l'effet Doppler.
3.1. Propriétés d'un signal modulé en fréquence.
3.1.1.
Hypothèses relatives au signal modulé en fréquence.
• L'émetteur émet un son fonction sinusoïdale du
temps, dont l'expression est donnée par : `color(navy)(s(t) = A
sin(varphi_s(t)))`.
• `color(navy)(varphi_s(t))` : désigne la phase du signal
sinusoïdal à la date t.
• `color(navy)(omega_s(t) = {dvarphi_s(t)}/{dt})`: désigne la pulsation
instantanée du signal sinusoïdal à ladate t.
• On peut encore écrire : `color(navy)(omega_s(t) = 2 pi f_s(t))` où
`color(navy)(f_s(t))` désigne la fréquence instantanée du signal
sinusoïdal à la date t.
3.1.2.
Hypothèse relative à l'évolution de la fréquence instantanée `f_s(t)`
du signal en fonction du temps.
3.1.2.1. Expression « générale » de la
fréquence `f_s(t)`.
• Cette expression est de la forme : fs(t) = f0 +m(t), où m(t) désigne
le signal modulant,
et où f0 désigne la fréquence de la « porteuse
» non
modulée.
Remarque : On passe
aisément de la fréquence `color(red)(f_s(t))` à la pulsation
instantanée `color(red)(omega_s(t))` par la relation :
`color(red)(omega_s(t) = 2 pi f_0 + 2 pi m(t))`.
3.1.2.2. Expression « générale » de la
phase `varphi_s(t)`.
• Bien entendu : `color(navy)(varphi_s(t) = int_0^t(2 pi f_0 + 2 pi
m(tau))d tau)` ; soit `color(navy)(varphi_s(t) = 2 pi f_0 t + 2 pi
int_0^tm(tau)d tau)`.
• Finalement il vient : `color(navy)(s(t) = Asin(2 pi f_0 t + 2 pi
int_0^tm(tau)d tau))`.
3.1.2.3. Résumons.
• L'expression de la fréquence instantanée `color(navy)(f_s(t))` du
signal modulé doit être de la forme : `color(navy)(f_s(t) = f_0 +
m(t))`
où `color(navy)(f_0)` désigne la fréquence de la « porteuse » et
où `color(navy)(m(t))` désigne le signal modulant.
• L'expression de la phase instantanée `color(navy)(varphi_s(t))` du
signal modulé doit être de la forme : `color(navy)(varphi_s(t) = 2 pi
f_0
t
+ 2 pi int_0^tm(tau)d tau)`.
• Aussi, partant de
l'expression de la fréquence `color(navy)(f_s(t))` du signal «
réel » en fonction du temps, devrons nous identifier
`color(navy)(f_0)` et le signal modulant `color(navy)(m(t))`, puis procéder à une intégration
pour obtenir l'expression de la phase `color(navy)(varphi_s(t))` du
signal sinusoïdal modulé...
3.2. Propriétés du signal Doppler « réel ».
3.2.1.
Observation générale.
• Nous avons bien affaire à un signal modulé en fréquence comme le
prouve le graphe représenté au paragraphe
- 2.4..
• Cependant l'expression analytique de la fréquence `color(navy)(f_D(t)
=880/{1 - {0,1(1
- t/4)}/sqrt(0,04 + (1 - t/4)^2)) Hz` ne permet pas d'identifier
aisément la fréquence `color(navy)(f_0)`, tout comme l'expression du
signal modulant `color(navy)(m(t))`.
3.2.2.
Proposons une « stratégie » pour résoudre notre problème. 3.2.2.1. Exprimons `f_D(t)` « ici » sous forme
polynomiale.
• Partant de l'expression analytique de `f_D(t)` rappelée au paragraphe -
3.2.1. , nous allons essayer de l'approcher par un
polynome de degré sept, d'expression :
`color(navy)(f_D(t)) = f_0 + a_1.t + a_2.t^2 + a_3.t^3 + a_4.t^4
+a_5.t^5 + a_6.t^6 + a_7.t^7`.
• Alors nous accéderons à `color(navy)(f_0)` et à `color(navy)(m(t) =
a_1.t + a_2.t^2 + a_3.t^3 + a_4.t^4 +a_5.t^5 + a_6.t^6 + a_7.t^7)`. 3.2.2.2. Recherche « pratique » de l'expression polynomiale de `f_D(t)`.
3.2.2.2.1.
Mise en œuvre de la commande « fit » de gnuplot®.
Cet extrait de l'aide :
• La commande « fit
» ajuste une expression à valeur réelle fournie par l'utilisateur à un
ensemble de points de données, à l'aide de l'algorithme des moindres
carrés non linéaires de Marquart-Levenberg. Il peut y avoir jusqu'à
douze variables indépendantes, il y a toujours une variable dépendante
et n'importe quel nombre de parmètres peut être ajusté. En option, des
estimations d'erreur peuvent être entrées pour pondérer les points de
données.
L'utilisation de
la base d'ajustement est mieux illustrée par un exemple simple (codage «
gnuplot® »)
:
f(x) = a + b*x + c*x**2
fit f(x) "mesured.dat" using
1:2 via a, b, c
plot "mesured.dat" u 1:2,
f(x)
• f(x) est la
forme polynomiale que l'on cherche.
• mesured.dat est
un tableau que l'on fournit, donnant sur deux colonnes les
couples (xi, yi) par lesquels on
veut voir passer le
graphe du polynome.
• L'algorithme détermine les coefficients a, b et c.
3.2.2.2.2.
Mise en œuvre pratique de la commande « fit » de gnuplot®
pour résoudre notre problème.
• Ici on propose le tableau « fit_00.dat » construit à
partir de l'expression analytique de la fréquence Doppler obtenue au paragrahe -
2.3.3. ; on prend un pas de 0,25 s comme l'intervalle de temps
appartient à : t ∈ [ 0 s, 8 s ] , nous aurons trente trois
valeurs...
• L'expression du signal modulant est donné par : `m(t) =
a_1.t + a_2.t^2 + a_3.t^3 + a_4.t^4 +a_5.t^5 + a_6.t^6 + a_7.t^7`.
3.2.2.3.2.
Donnons l'expression de la phase `varphi_D(t)` du signal Doppler.
• Nous savons que : `varphi_D(t) = 2 pi f_0 t + 2 pi
int_0^tm(tau)d tau` ; grâce
à la forme polynomiale, nous pouvons maintenant
intégrer le signal
modulant `m(t)` par rapport au temps !
• Calculons : `int_0^tm(tau) d tau =
int_0^t(a_1.tau + a_2.tau^2 + a_3.tau^3 + a_4.tau^4 +a_5.tau^5 +
a_6.tau^6 + a_7.tau^7) d tau`.
• Puis : `int_0^tm(tau) d tau = [a_1/2.tau^2 + a_2/3.tau^3 +
a_3/4.tau^4 + a_4/5.tau^5 +a_5/6.tau^6 + a_6/7.tau^7 +
a_7/8.tau^8]_0^t`.
• Enfin : `int_0^tm(tau) d tau = a_1/2.t^2 + a_2/3.t^3 + a_3/4.t^4 +
a_4/5.t^5 +a_5/6.t^6 + a_6/7.t^7 + a_7/8.t^8`.
• Et : `varphi_D(t) = 2 pi (f_0 t + a_1/2.t^2 + a_2/3.t^3 + a_3/4.t^4 +
a_4/5.t^5 +a_5/6.t^6 + a_6/7.t^7 + a_7/8.t^8)`.
3.2.2.3.3. Donnons l'expression du signal Doppler sD(t).
• Partant de : `s_D(t) = A
sin(varphi_D(t))`, il vient : `color(navy)(s_D(t) = A
sin(2 pi (f_0.t + a_1/2.t ^2+ a_2/3.t^3 + a_3/4.t^4 + a_4/5.t^5
+a_5/6.t^6
+ a_6/7.t^7 + a_7/8.t^8))`.
3.3. Génération d'un fichier audio au format « .wav » à partir de
l'expression analytique du signal Doppler sD(t) .
3.3.1.
La méthode mise en œuvre.
• À partir de l'expression analytique de sD(t), il
est possible
de construire un fichier de données contenant les couples (ti, sD(ti)) ;
ti est la date à laquelle
on échantillonne
le signalsD(t),
et sD(ti) représente
l'amplitude de ce même
signal à la date ti...
• L'intervalle de temps tEch = ti+1 - ti est la période
d'échantillonnage, suffisament courte pour qu'une sinusoïde
représentative du signal soit échantillonnée plusieurs fois
sur la durée de sa période, par exemple seize fois...
• Ainsi pour un signal de fréquence 880 Hz (La4), la
fréquence
d'échantillonnage est alors égale à fEch =
880x16 Hz, soit fEch = 14080 Hz ; on préférera utiliser la
valeur « normalisée » la plus proche : fEch = 16000 Hz.
• Bien entendu, ici, ti prendra ses valeurs
dans l'intervalle [ 0s, 8s ].
• On construit
alors le fichier« doppler.dat »dont on donne
un
extrait : ; Sample Rate 16000
; Channels 1
0
0
6.25e-05
0.37307739258
0.000125
0.69219970703
...
...
7.9999375
-0.74465942383
8 -0.91491699219
• Le fichier contient deux lignes « commentées » : Sample Rate qui
rappelle la fréquence d'échantillonnage du signal sD(t), et Channels qui indique le
nombre de canaux audio traités ; ici
il n'y a q'un seul canal. Bien entendu on trouve à la suite la liste
des
échantillons (ti, sD(ti)).
3.3.2.
Génération du fichier « .wav ».
• Le fichier de données « doppler.dat »doit être traité
par un logiciel permettant d'obtenir un fichier audio !
• Le logiciel SoX® (Sound eXchange, en
français « échange
sonore »)
est un utilitaire pour Unix (dont Linux), MacOs et Windows, en ligne de
commande, permettant la manipulation de sons et leur conversion dans
différents formats audio.
• Ainsi, en frappant la commande : sox doppler.dat doppler.wav,
on obtient un fichier audio au format « .wav », illustrant ci l'effet Doppler
(tout simplement) !
• C'est ici que
les deux lignes «
commentées » montrent leur importance ; car
elles sont nécessaires au bon déroulement du processus de conversion...
Remarque : Il
est possible de faire l'opération inverse et d'extraire d'un fichier « .wav » le
fichier « .dat » en frappant par
exemple « ici » la
commande : sox
doppler.wav doppler.dat.
3.3.3. Écoute
du fichier « doppler.wav ».
• Cette
écoute «
traduit »
bien l'effet Doppler !
3.4. Spectrogramme du fichier audio « doppler.wav ».
• On donne à la figure suivante l'évolution de la fréquence du signal « doppler » en fonction du temps ;
on trace son spectrogramme.
Remarque
: Ce graphe a été réalisé à l'aide du
logiciel Audacity®.
• On
obtient bien le résultat attendu !
3.5. On prend en compte l'atténuation de la puissance acoustique
liée à la distance D0 entre la source sonore et
l'observateur.
3.5.1. Position
du problème.
• La puissance acoustique reçue par l'observateur est inversement
proportionnelle au carré de la distance D0 séparant la
source sonore de
l'observateur : `P ∝ 1/D_0^2`.
• Ici : `D_0 = sqrt(d^2
+ (D/2 -v t)^2)`, soit encore `D_0 = dsqrt(1
+ D^2/{4d^2}(1 -{2vt}/D)^2)`.
• Compte tenu des valeurs numériques, il vient : `D_0 = dsqrt(1
+ 25(1 -t/4)^2)`.
• La distance D0 est maximale pour t = 0 s et t = 8 s ;
alors `D_{0_max} = dsqrt(26)`, `D_{0_max} = 134,6 m`.
• La distance D0 est minimale pour t = 4 s ; alors
`D_{0_min} = d`, avec d = 26,4 m.
3.5.2.
Expression de la puissance acoustique.
• Le signal acoustique a comme expression `s_D(t) = A
sin(2 pi (f_0.t + a_1/2.t ^2+ a_2/3.t^3 + a_3/4.t^4 + a_4/5.t^5
+a_5/6.t^6
+ a_6/7.t^7 + a_7/8.t^8)`, son amplitude A doît maintenant être
pondérée part le terme `1/D_0`.
• L'expression tremporelle du signal devient : `s_D(t) = A/{dsqrt(1
+ 25(1 -t/4)^2)}
sin(2 pi (f_0.t + a_1/2.t ^2+ a_2/3.t^3 + a_3/4.t^4 + a_4/5.t^5
+a_5/6.t^6
+ a_6/7.t^7 + a_7/8.t^8)`.
• La puissance acoustique du signal sonore est
proportionnelle au carré de son amplitude : Soit ici `P ∝
A^2/{d^2(1
+ 25(1 -t/4)^2)}` , soit `P ∝
A^2/D_0^2` ; on montre bien que la puissance est inversement
proportionnelle au carré de la distance séparant la source sonore de
l'observateur !
• La puissance acoustique maximale obtenue pour t = 4 s est
proportionnelle à : `P_max ∝ A^2/d^2`.
• La puissance acoustique minimale obtenue pour t = 0 s et t = 8
s est proportionnelle à : `P_min ∝ A^2/{26d^2}`; et le rapport
`P_min/P_max`est égale ici à : `P_min/P_max= 1/26`.
• Ce rapport donné en decibels conduit au résultat :
`10log(P_min/P_max)= -10log(26) dB` ; `10log(P_min/P_max)= -14,15 dB`.
3.5.3.
Construction du signal acoustique modulé en fréquence et en amplitude.
• Partant
de la nouvelle expression analytique du signal `s_D(t)`,
soit `s_D(t) = A/{sqrt(1
+ 25(1 -t/4)^2)}
sin(2 pi (f_0.t + a_1/2.t ^2+ a_2/3.t^3 + a_3/4.t^4 + a_4/5.t^5
+a_5/6.t^6
+ a_6/7.t^7 + a_7/8.t^8)`.
Remarque : On
observe que dans cette expression n'apparaît plus la distance minimale d, a priori on affectera à la
puissance maximale `P_max`la valeur 0 dB (en donnant à l'amplitude A la
valeur 1) !
• À partir de la nouvelle expression analytique de sD(t), on
construire un fichier de données contenant les couples (ti, sD(ti)) ;
ti est la date à laquelle
on échantillonne
le signalsD(t),
et sD(ti) représente
l'amplitude de ce même
signal à la date ti...
• L'intervalle de temps tEch = ti+1 - ti est la période
d'échantillonnage, suffisament courte pour qu'une sinusoïde
représentative du signal soit échantillonnée plusieurs fois
sur la durée de sa période, par exemple seize fois...
• Ainsi pour un signal de fréquence 880 Hz (La4), la
fréquence
d'échantillonnage est alors égale à fEch =
880x16 Hz, soit fEch = 14080 Hz ; on préférera utiliser la
valeur « normalisée » la plus proche : fEch = 16000 Hz.
• Bien entendu, ici, ti prendra ses valeurs
dans l'intervalle [ 0 s, 8 s ].
• On construit
alors le fichier« doppler_module_en_amplitude.dat »dont on donne
un
extrait : ; Sample Rate 16000
; Channels 1
0.0
0.0
6.25e-05 0.0731647481999872
0.000125 0.135767592493615
...
...
7.9999375 0.195599447388499
8.0
0.181272447324768
• On génére le fichier « doppler_module_en_amplitude.wav
» en frappant la commande : sox
doppler_module_en_amplitude.dat doppler_module_en_amplitude.wav,
on obtient un fichier audio au format « .wav », illustrant ci l'effet Doppler
avec atténuation de la puissance acoustique avec la distance.
3.5.4. Écoute
du fichier « doppler_module_en_amplitude.wav ».
• Cette
écoute «
traduit »
bien l'effet Doppler et montre l'atténuation liée à la distance entre
la
source sonore et l'observateur !
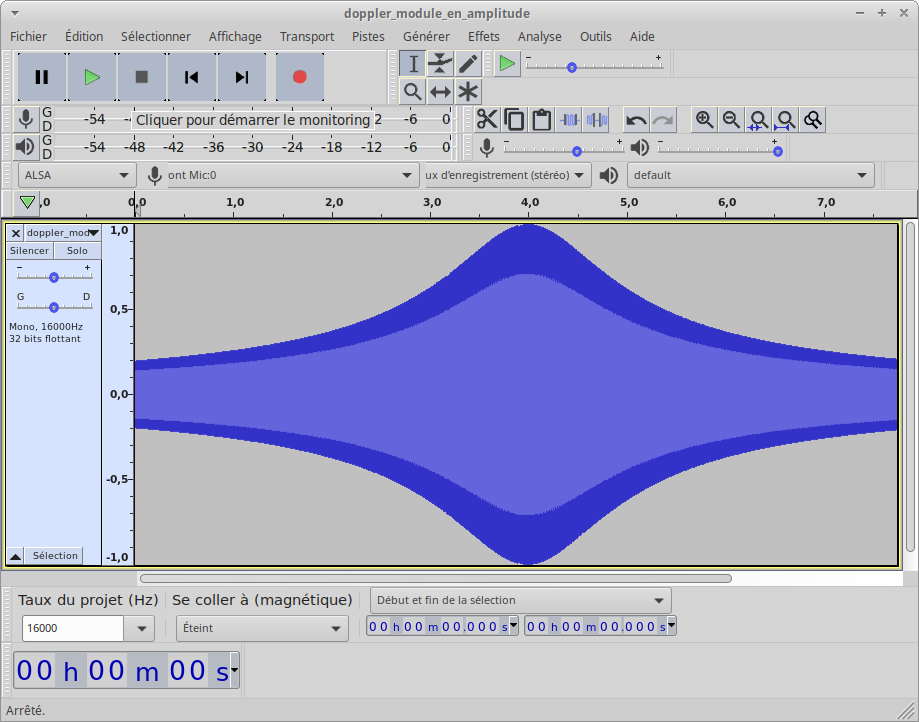
3.6. Observation du signal dans le domaine temporel.
Remarque
: Ce graphe a été réalisé à l'aide du
logiciel Audacity®.
• On observe le signal dans l'intervalle de temps [0 s ,8 s].
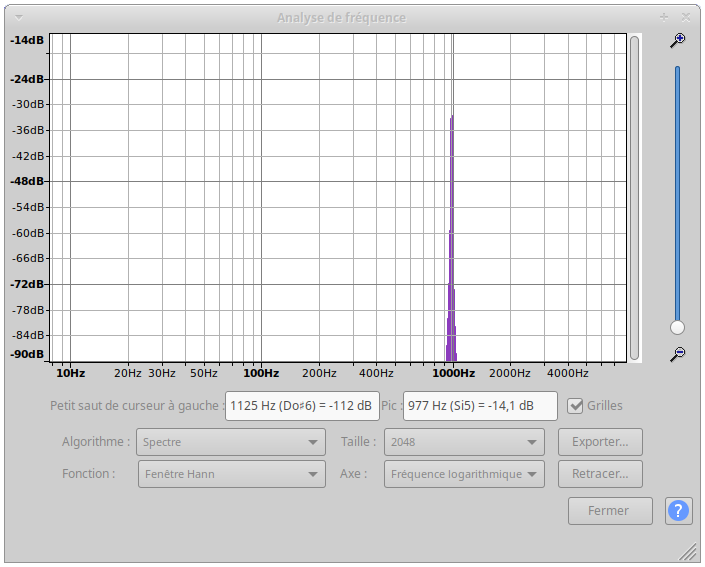
3.7. Comportement fréquentiel au voisinage de 0 s et de 4 s.
3.7.1. Réponse
fréquentielle au voisinage de t = 0 s.
Remarque
: Ce graphe a été réalisé à l'aide du
logiciel Audacity®.
• On observe le signal au voisinage de t = 0 s dans l'intervalle de
temps [0 s , 0,128 s], ce qui correspond à la prise de 2048 échantillons.
• Bien que le signal soit ici « sensiblement modulé en fréquence», on
détecte un pic d'amplitude -14,1 dB pour la fréquence de 977 Hz, ce qui
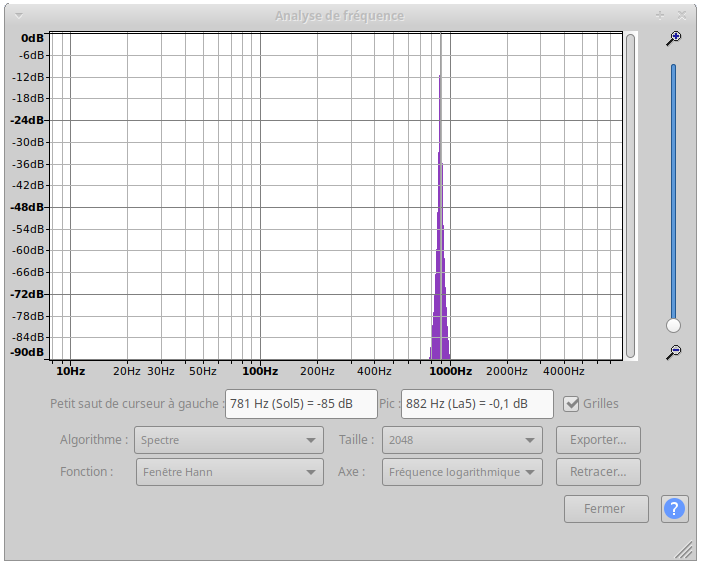
est tout à fait acceptable ! 3.7.2.
Réponse
fréquentielle au voisinage de t = 4 s. Remarque
: Ce graphe a été réalisé à l'aide du
logiciel Audacity®.
• On observe le signal au voisinage de t = 4 s dans l'intervalle de
temps [3,936 s , 4,065 s], ce qui correspond à la prise de 2048
échantillons.
• Bien que le signal soit ici « sensiblement modulé en fréquence», on
détecte un pic d'amplitude -0,1 dB pour la fréquence de 882 Hz, ce qui
est tout à fait acceptable ! 3.7.3.
Rapport des puissances acoustique.
• On écrit : `10log(P_min/P_max)= P_min dB - P_max dB`. Il vient
`10log(P_min/P_max)= -14,1 - (-0,1) dB`; soit
`10log(P_min/P_max)= -14 dB`, on trouve bien le résultat attendu
!
4. Remerciements.
• Cette page n'aurait pas pu être composée sans les « outils »
fournis parAsciiMath, à l'URL : <http://asciimath.org/>.
• Cette page a pu être développée et affichée correctement
grâce à l'utilisation du réseau de distribution de contenu MathJax
(CDN). Toute la documentation relative à MathJax est
accessible à l'URL :
<http://docs.mathjax.org/en/latest/index.html>.
• Les calculs et les graphes ont été réalisés à l'aide du
logiciel gnuplot®,
dont la
documentation est accessible à
l'URL : <http://www.gnuplot.info/>.
• La génération du fichier « son » a
été réalisée à l'aide du
logiciel SoX® dont la documentation ici, une «
page de manuel » (manpage)... est
accessible à l'URL : <https://manpages.org/sox/>.